
Основные тех. характеристики:
-
- ARM Cortex M3
- Разрядность — 32-х битный
- Частота — 72МГц
- Flash-память — 64КБ / 128КБ
- Оперативная память — 20КБ
- SPI — две штуки
- I2C — две штуки
- UART — три аппаратных UART’а + USB (то есть получается четыре интерфейса)
- CAN-шина
- АЦП — 12-и битный
- ШИМ — 16-и битный
- Напряжение питания — от 2 до 3.6В (то есть можно запитать от двух «пальчиковых» батареек)
- Внутренние часы реального времени (на плате есть специальный пин — Vbat, для подключения батарейки)
Основную информацию по использованию контроллеров STM32 с Arduino IDE можно посмотреть тут: https://github.com/stm32duino/wiki/wiki/Getting-Started.
Немного информации из личного опыта.
Я программирую используя режим STM32CubeProgrammer(Serial).
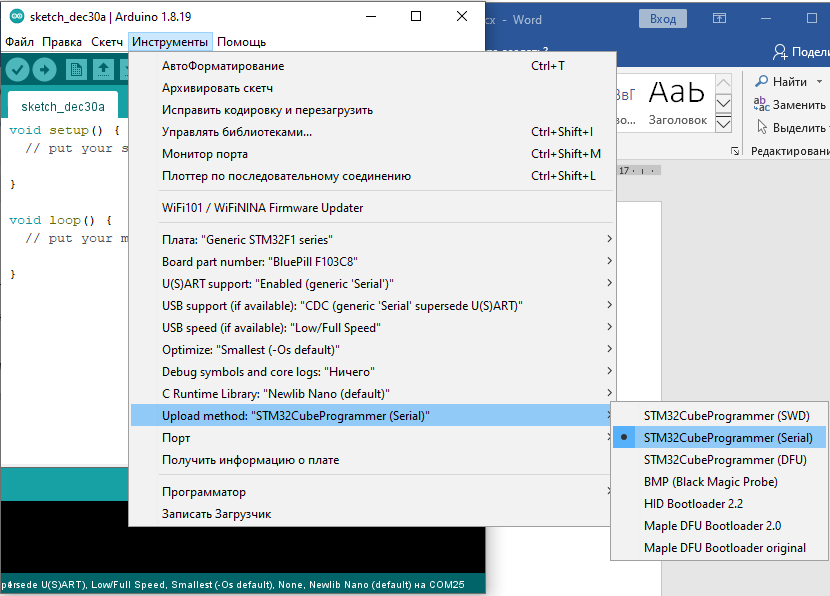
Для использование данного режима необходимо установить на компьютер программу STM32CubeProgrammer. Как я уже писал ранее в мире существует сумасшедший человек, и поэтому скачать данную программу из России можно только через ВПН, и то обманув систему с местом своего жительства. Мне это удалось и поэтому я скачал текущую версию для различных ОС, и вы можете скачать их по этим ссылкам.
1.Win32
2.Win64
3.Linux
4.Mac Oc
Об этом и других методах прошивки поподробнее можно почитать здесь: https://github.com/stm32duino/wiki/wiki/Upload-methods#stm32cubeprogrammer.
Так же есть интересное видео:
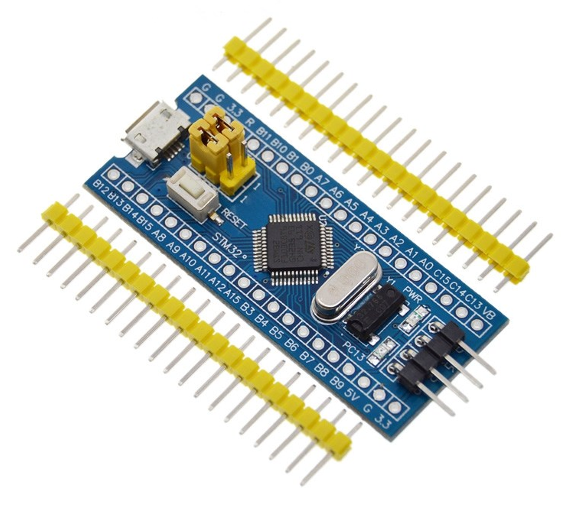
Некоторые особенности пинов Blue Pill.
Будьте осторожны с пинами РА11 и РА12 — это USB, если что-то пойдёт не так, то помимо потери возможности прошивки МК по usb, можно ещё и комп повредить.
К пинам РС14 и РС15 подключён внешний кварц для часов (32.768).
Другие пины могут выдать максимум 20мА, рекомендуется 8мА. Общая максимальная нагрузка не должна превышать 150мА.
Несмотря на то, что напряжение питания ~3В, половина «ножек» терпимы к пяти вольтам. Что конечно же значительно облегчает использование различной периферии.
Светодиод РС13 (который у ардуины D13) включается не плюсом, а минусом. Это на всякий случай, чтоб у Вас не произошло когнитивного диссонанса, когда напишите — digitalWrite(PC13, HIGH), а диод погаснет
У МК отсутствует EERPOM, но это решается подключением внешней флешки по I2C или SPI.
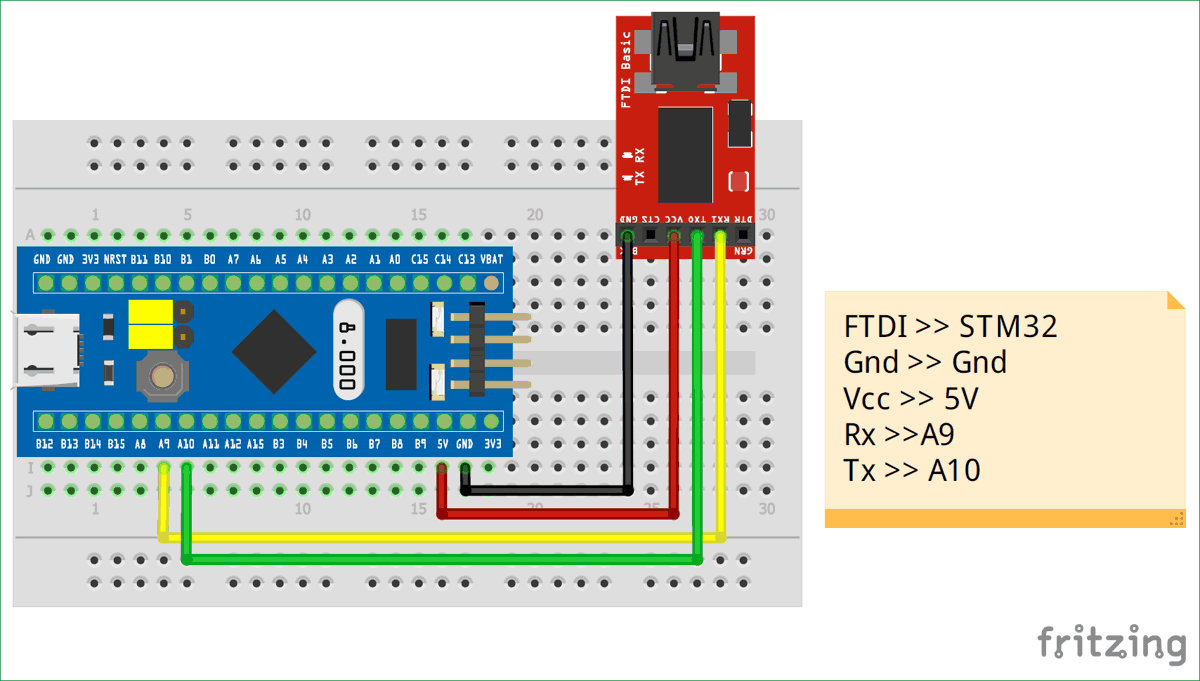
Подключение программатора (UART)
Подключение W550
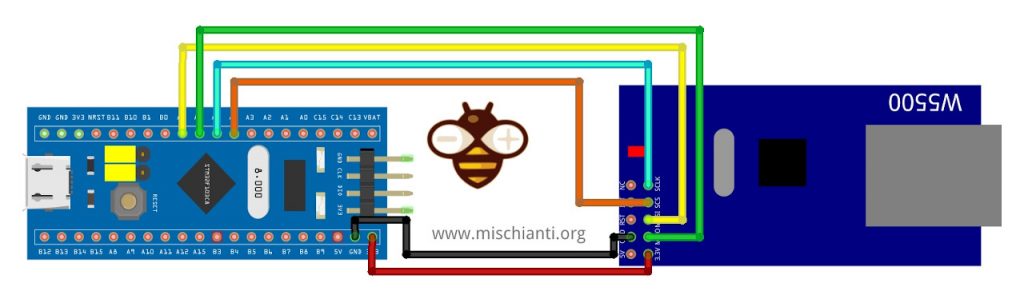
| STM32 | W5500 |
| PA4 | CS |
| PA5 | SCK |
| PA6 | MISO |
| PA7 | MOSI |
| 3.3V | VCC |
| GND | GND |
Особенности использования Serial0.
Поскольку Serial0 в STM32 подключен к USB, то для его использования при прошивке контроллера обязательно должна быть включена поддержка USB как “Generic Serial”.
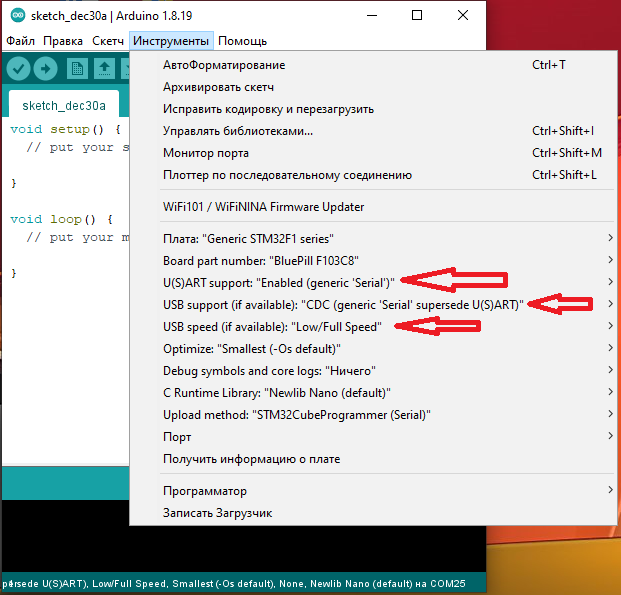
В противном случае при компиляции если используется Serial0 будет выдаваться ошибка. По умолчанию при использовании интегрированного в программу FLProg описания используются именно такие настройки.
Дополнительные файлы, которые могут потребоваться:
- Flash Loader Demonstrator
- Бинарник прошивки Maple DFU Bootloader (generic_boot20_pc13.bin)
- Драйвера для Maple (Windows)
- Бинарники для прошивки HID Bootloader







Здравствуйте Сергей.
Спасибо что вы есть , что мы вместе (хотя наши взгляды на жизнь различаются), думаем об одном , но с разной степенью технических и интеллектуальных способностей, а значит и возможностей. В данное время вы пополняете базу контроллеров необходимых для управления различными системами управления и автоматизации.
Я к вам обращаюсь как пользователь вашей программой FLProg. В данное время разрабатываю проект солнечного трекера который будет с помощью шагового двигателя осуществлять поворот солнечной панели в соответствии со скоростью движения солнца. До этого мной трекер был сделан на сервоприводе . Сервопривод оказался не надежным механизмом(не дешёвый,20кг,медные шестерни), ввиду отсутствия устойчивости панели при наличии ветровой нагрузки. Эффективность поворотной солнечной панели превзошла стоящую до нее стационарную панель на 40%.
Когда я решил перейти на шаговый двигатель (NEMA 17) то обнаружил недостаток . Во встроенных блоках нет блока который отвечал бы за мой контроллер.
Конечно я пробовал подключать пользовательский блок. Но в моем контроллере WEMOS mini напихано очень много функций по отслеживанию заряда каждой из шести батарей по WI-FI удаленно через облако Каскады.
Не могли бы вы после завершения ваших планов, добавить блоки для управления драйверами шаговых двигателей? В частности у меня драйвер A4988.
Здоровья вам и новых идей!
Спасибо , с Новым Годом !!
С Новым Годом, Сергей!
Спасибо за Ваш труд!